2025-10
18Three loop control of servo electric cylinder: collaborative control of position, speed, current (torque) closed-loop
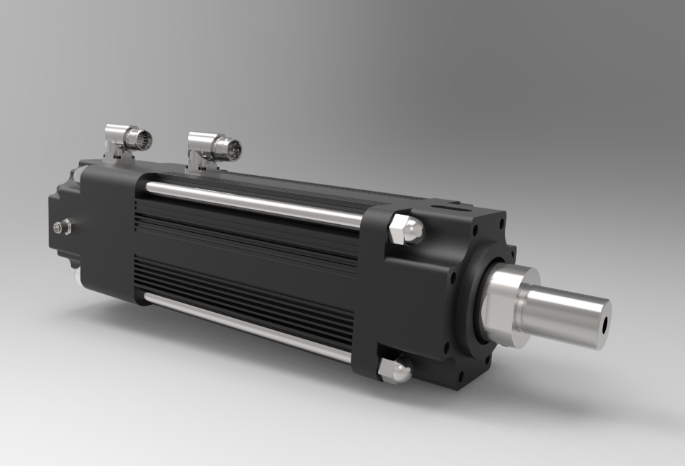
The "three loop control" of servo electric cylinder refers to a three-layer nested closed-loop control structure with current loop (torque loop), speed loop, and position loop as the core, which wraps and cooperates with each other from the inner to the outer layers, ultimately achieving high-precision and high stability position/speed/torque output of the electric cylinder. The core logic of the three-layer loop is: the inner loop (current loop) responds quickly and suppresses high-frequency interference; Stable dynamic characteristics and smooth motion of the middle ring (velocity ring); The outer ring (position ring) accurately locates and matches the load requirements, jointly solving the control objectives of "stable movement, accurate stopping, and fast response".
 Language
Language